
 (C:)
(C:) cs300
cs300 A Survey on the Bichon Frisé
A Survey on the Bichon Frisé
Computer
The cs400 covers the rudimentary elements of Computer Science and aims to enhance the work-related self-efficacy of someone only with a degree in Mathematics. This first post traces the arc from mechanical calculators to modern accelerators, covering the hardware that underpins all computation.
- https://www.youtube.com/watch?v=ISJ44S5sZu8
- https://www.youtube.com/watch?v=HbgzrKJvDRw
I
1.1. Computer
Charles Babbage’s Analytical Engine (1837) is widely regarded as the first conceptual design of a general-purpose digital computer. It separated a processing unit from memory, supported conditional branching and loops via three types of punch cards, and was Turing-complete by modern definitions. Ada Lovelace wrote what is considered the first computer program for it. Alan Turing, a century later, introduced the famous Turing Machine in Turing (1936), an abstract device that formalised the limits of what machines can compute, resolved the Entscheidungsproblem negatively, and laid the theoretical foundation for modern computer science.
The Electronic Numerical Integrator and Computer (ENIAC), completed in 1945 by J. Presper Eckert and John Mauchly is perhaps the first programmable electronic general-purpose digital computer. It used 17,468 vacuum tubes, occupied a 50×30-foot room, consumed 174 kW, and performed up to 5,000 additions per second, which is orders of magnitude faster than electromechanical predecessors. Von Neumann (1945) then described the stored-program concept, the idea of storing both instructions and data in the same uniform memory, via the Von Neumann architecture that still dominates computer design.
The transistor, demonstrated in 1947 by Bell Labs (Nobel Prize in Physics, 1956), replaced vacuum tubes with devices which were smaller, faster, more reliable, and consumed far less power. The next leap came with the integrated circuit (IC). Jack Kilby at Texas Instruments showed the first working IC on a germanium substrate in 1958 (Nobel Prize in Physics, 2000), while Robert Noyce at Fairchild Semiconductor independently devised the planar silicon IC with aluminium metallisation (January 1959) that enabled mass production. The IC’s key innovation was consolidating transistors, resistors, and capacitors onto a single semiconductor substrate.
Moore (1965) claimed that the number of transistors per IC had been doubling roughly every year (he revised to every two in 1975). This empirical trend, called Moore’s Law, held for over five decades and guided the semiconductor industry’s roadmap. The Intel 4004 (1971), originally commissioned by the Japanese calculator maker Busicom before Intel retained the rights, was the first commercial microprocessor packed 2,300 transistors into a 4-bit CPU on a 12 mm² die. The decade later, the IBM PC (1981), built with an open architecture and Intel’s 8088 processor, standardised personal computing and spawned the clone ecosystem that persists today.
A motherboard provides the physical circuitry implementing the Von Neumann architecture, wiring a CPU socket, RAM slots, storages, I/O ports, and expansion slots via buses and chipsets. Modern motherboards support add-in cards such as GPUs and NICs. Firmware (BIOS or UEFI) performs power-on self-tests (POST) and invokes a bootloader (e.g. GRUB - Linux, Boot Manager - Windows) which loads a kernel into RAM from storage. Although computers vary in purpose, as in personal computers for general use, mainframes for high-volume transaction processing, and supercomputers for scientific simulation, they all rest on this stored-program model.

1.2. Central Processing Unit
A central processing unit (CPU) executes instructions via the fetch-decode-execute cycle: fetch the instruction at the address in the program counter, decode it to determine the operation and operands, execute it, write back results, and advance the counter. Each core contains an arithmetic logic unit (ALU) for integer and logic operations, a floating-point unit (FPU) for real-number computations, and a control unit (CU) that orchestrates data flow. The CPU’s instruction set architecture (ISA) defines the binary interface between software and hardware, specifying the set of instructions, registers, addressing modes, and data types that programs may use.
The ISA landscape can be shaped by the RISC vs CISC debate. Intel’s x86 (1978) exemplifies CISC: variable-length instructions (1-15 bytes), memory operands in arithmetic, and complex addressing modes. Whereas, Acorn Computers designed ARM in 1985, with only 25,000 transistors, and it exemplifies RISC: fixed-length instructions, a load/store architecture, and a large register file. RISC-V, started in 2010 at UC Berkeley, provides a royalty-free, modular open-source ISA. In practice, the distinction has blurred as modern x86 CPUs (since 1995) internally decode CISC instructions into RISC-like micro-ops for out-of-order execution.
Pipelining overlaps instruction execution stages so that, ideally, one instruction completes per cycle. The out-of-order execution, first realised in Tomasulo’s algorithm on the IBM System/360 Model 91 (1967), uses register renaming and reservation stations to dispatch ready instructions regardless of program order. Branch prediction guesses the direction of conditional branches, reaching 95-99% accuracy but incurring a 10-20 cycle penalty on misprediction. Speculative execution executes past unresolved branches and rolls back on misprediction, the mechanism famously exploited by the Spectre and Meltdown vulnerabilities (2018).

A CPU’s word size, the number of bits it processes per operation, affects register width, addressable memory, and ISA design. A 32-bit CPU addresses 4 GB, while a 64-bit CPU addresses 16 EB in theory. Opteron (2003) from AMD made the jump practical for x86 by introducing x86-64 (AMD64), an extension Intel later adopted as EM64T. Clock speed measures how quickly instructions are issued, but around 2004 it plateaued at ~3-4 GHz when Dennard scaling (1974), the principle that power density stays constant as transistors shrink, broke down at the 90 nm node as leakage current and threshold voltage stopped tracking.
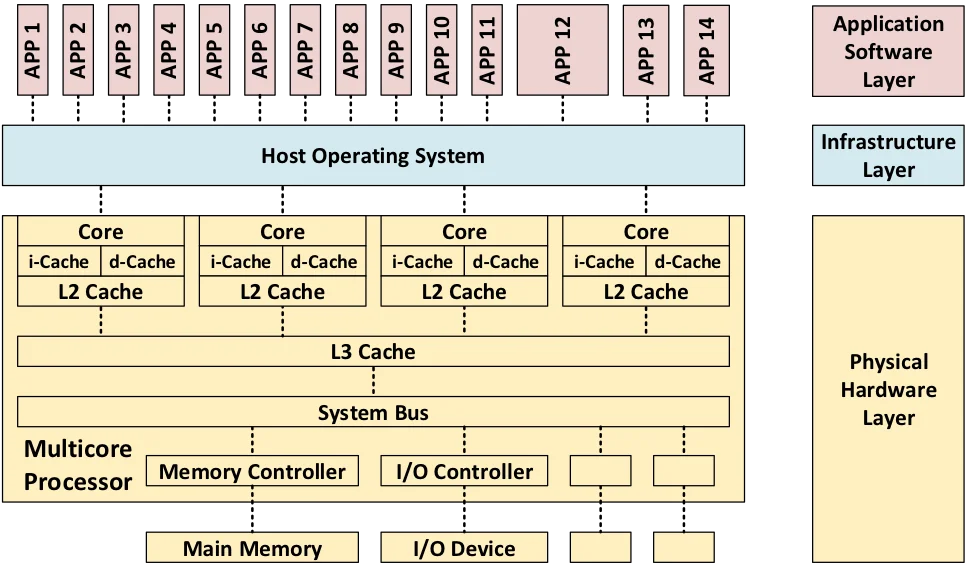
The industry responded by shifting to multi-core architectures: rather than one core at 6 GHz, use multiple cores at lower frequencies within the same power envelope. Modern examples include Apple’s M-series (ARM-based SoC with heterogeneous big.LITTLE cores and unified memory), AMD’s Zen (chiplet architecture with compute dies on 7 nm + I/O die on 12 nm, connected via Infinity Fabric), and Intel’s Alder Lake (hybrid P-core + E-core design). This unlocked true multiprocessing for many software developers, given that the OS can schedule independent processes onto separate cores in parallel rather than time-slicing them on a single core CPU.
1.3. Random Access Memory
Computer memory forms a hierarchy trading off speed, capacity, and cost. At the top, registers (<1 ns) hold data immediately needed by the CPU. A cache hierarchy of L1 (~1 ns, per core), L2 (~3-10 ns, per core or shared), and L3 (~10-20 ns, shared) sits underneath, all built from static RAM (SRAM) that stores each bit in a six-transistor flip-flop requiring no refresh. Main memory uses dynamic RAM (DRAM), which stores each bit in a single transistor plus capacitor, far denser and cheaper but slower (~50-100 ns) and also requiring periodic refresh as capacitors leak charge. The well-known term memory wall was coined by Wulf and McKee (1995).
Multiple cores caching the same address means one core’s write can desync the others, thus cache coherence protocols keep them aligned by broadcasting updates. The MESI protocol assigns each cache line one of four states (Modified, Exclusive, Shared, Invalid) and uses bus snooping or directory-based schemes to maintain consistency. False sharing occurs when unrelated data on the same cache line (typically 64 bytes) causes coherence traffic between cores. A well-designed program achieves high temporal and spatial locality, accessing the same data repeatedly and accessing contiguous addresses, to maximise cache hit rates.
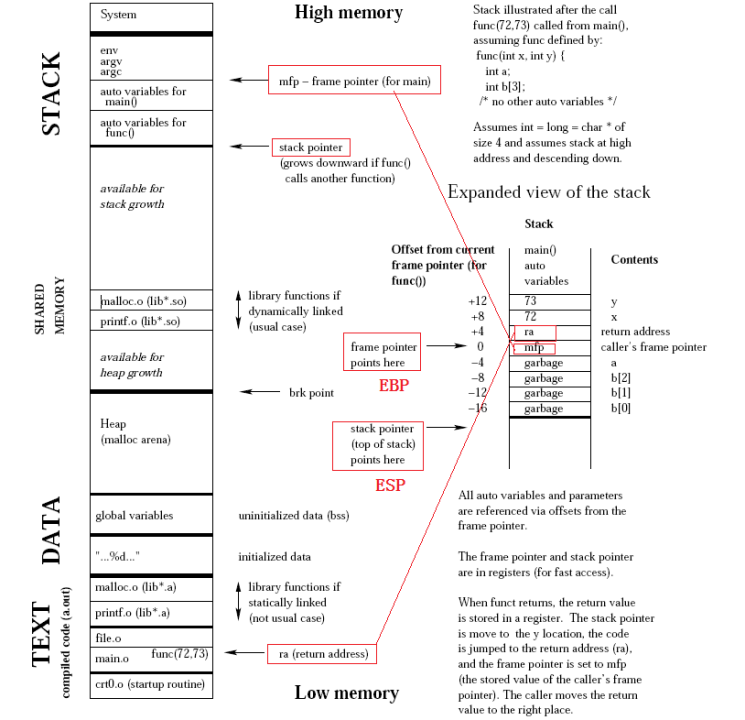
An instance of a program, known as a process, resides in RAM during execution. Its memory layout is divided into segments: the text segment contains executable machine instructions (read-only, with hardware-backed execution prevention such as DEP or NX bit), the data segment holds global and static variables, the heap supports dynamically allocated data (via system calls like malloc/free), and the stack handles function calls and local variables in a last-in, first-out (LIFO) structure. Stack operations are fast because stacks are preallocated, but heap allocations are more flexible at the cost of fragmentation, cache misses, and potential memory leaks.
1.4. Persistent Storage
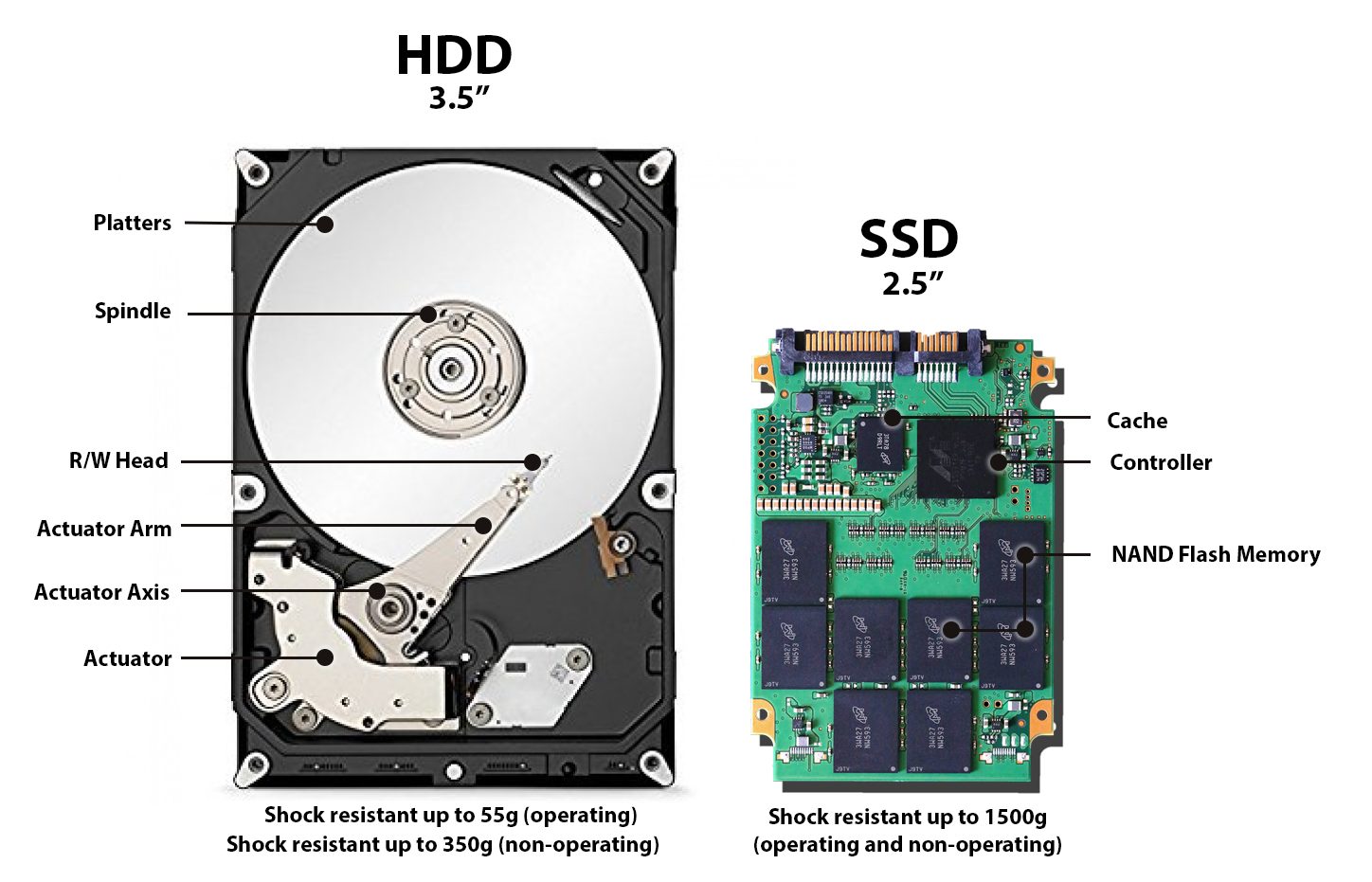
Persistent storage retains data without power. Hard disk drives (HDDs) store data magnetically on spinning platters with read/write heads on an actuator arm. Performance is dominated by mechanical delays: seek time (~10 ms average) for the head to reach the correct track, and rotational latency (half the rotation period, ~4.2 ms at 7,200 RPM) for the desired sector to pass under the head. Sequential throughput reaches 100-200 MB/s, but random access is severely limited by these physical movements. By the 2010s, driven by falling NAND prices and Intel’s early consumer SSDs, SSDs had largely replaced HDDs for primary storage.
Solid-state drives (SSDs) use NAND flash memory, where each cell is a transistor with an electrically isolated floating gate. Cells are organised into pages (~4-16 KB, the unit of read/write) and blocks (256-512 pages, the unit of erase). This asymmetry, where data is programmed at page level but erased at block level, necessitates garbage collection (relocating valid pages from partially-stale blocks, then erasing them) and the TRIM command (letting the OS notify the SSD when files are deleted). Each cell has a limited number of program/erase cycles (1K-100K, fewer as more bits are packed per cell), so wear leveling distributes writes evenly across the device.
II
2.1. Graphics Processing Unit
Early GPUs were fixed-function hardware for graphics rendering, hardwiring vertex transformation, lighting, rasterisation, and texturing with no programmability. NVIDIA’s GeForce 256 (1999), marketed as the world’s first GPU, moved hardware transform and lighting onto the graphics card but kept the pipeline fixed. Programmable shaders arrived with the GeForce 3 (2001), and the decisive shift came with the Tesla microarchitecture (2006) whose GeForce 8800 GTX was the first GPU with unified shaders. That is, vertex and pixel processors were merged into general-purpose streaming processors (128 SPs across 16 SMs, 681M transistors on 90 nm).
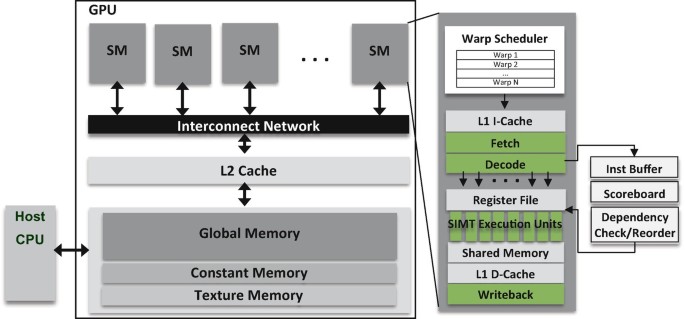
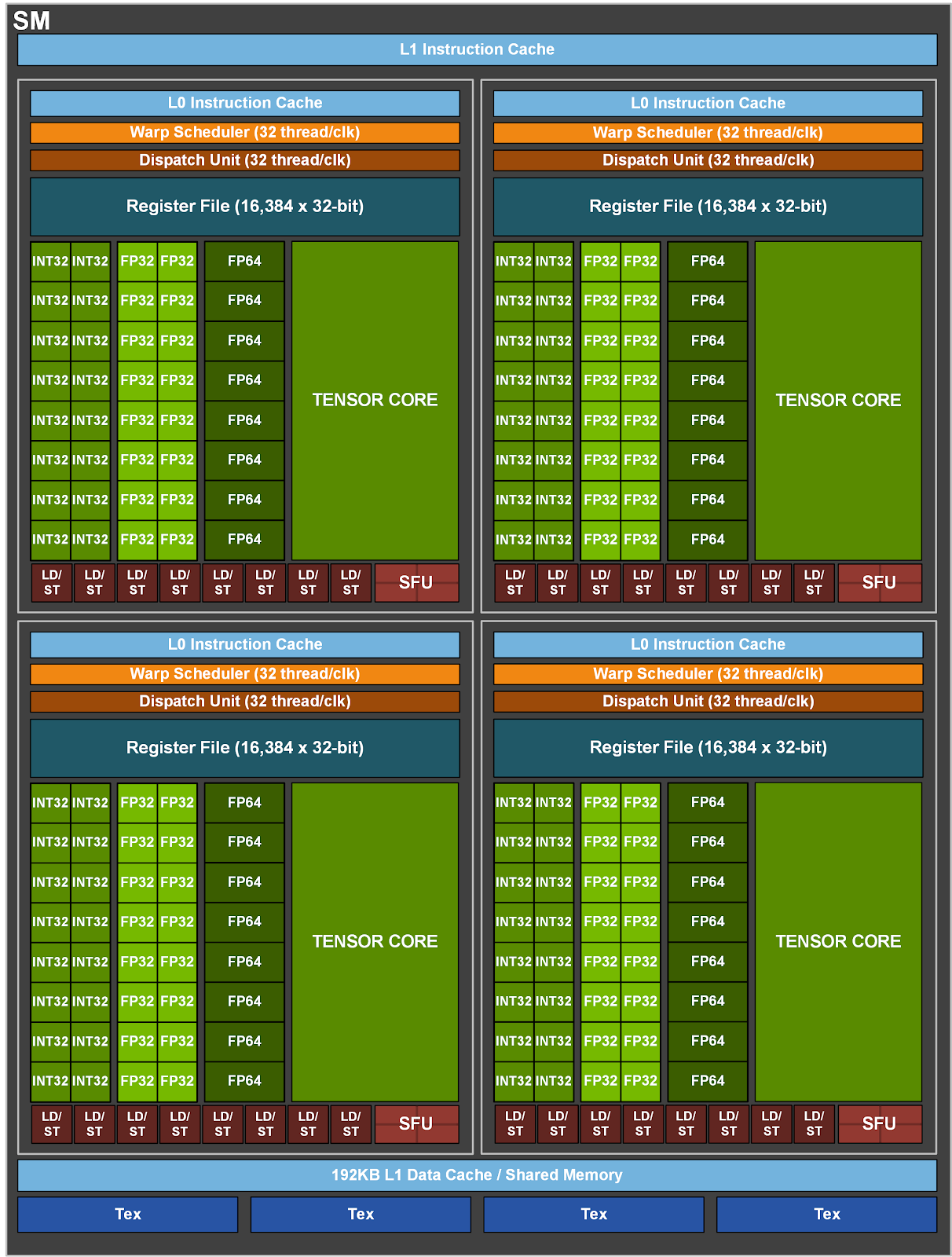
A GPU consists of streaming multiprocessors (SMs), each a self-contained processing unit with its own register file, shared mem./L1 cache, warp schedulers, and execution units. The fundamental scheduling unit is a warp, a bundle of 32 threads executing the same instruction in lockstep, following the SIMT model. If threads within a warp take different branches (warp divergence), the SM executes each path separately and wastes slots for inactive threads. Each SM runs multiple warp schedulers that switch to a ready warp the moment one stalls on a memory access, hiding memory latency through parallelism (i.e. more threads) rather than large caches.
Compute unified device architecture (CUDA), released in February 2007, made GPUs programmable for general-purpose computing by providing a C-based programming model that abstracted away graphics concepts. That is, general-purpose GPU required abusing graphics APIs which expressed computations as texture operations in OpenGL shading language (GLSL) or C for graphics (Cg). It enabled researchers to write parallel programs directly, given that wide range of linear algebra can be computed in parallel, and GPUs became natural accelerators beyond graphics, creating the ecosystem that would later prove decisive for the deep learning revolution.
2.2. CUDA & Tensor Core
A CUDA core is a scalar execution unit within an SM that performs one floating-point or integer operation per cycle per thread. They suit graphics and general parallel workloads but lack hardware for the dense matrix multiply-accumulates (MMAs), which together with non-linear activation functions is the heart of deep learning. Tensor cores, introduced with Volta in the Tesla V100 (2017), address this by performing a 4×4 mixed-precision FMA (FP16 × FP16 → FP32), i.e. 64 multiply-adds per clock. These 640 tensor cores equipped in V100 can deliver 125 TFLOPS mixed-precision, an order of magnitude beyond its 15.7 TFLOPS FP32 CUDA throughput.
Micikevicius et al. (2017) showed that most forward and backward computations tolerate FP16 precision, with only weight updates requiring FP32 accuracy. Two techniques make this work: (i) maintaining an FP32 master copy of weights, and (ii) loss scaling to preserve small gradients in FP16’s limited range. PyTorch 1.6+ supports automatic mixed precision (AMP) via @torch.autocast and torch.GradScaler, making this technique accessible with minimal code changes. Subsequent generations expanded tensor core support: the Ampere architecture in the A100 (2020) added TF32, BF16, INT8, and structured sparsity (2:4 pattern, up to 2× speedup);
The Hopper architecture in the H100 (2022) introduced the Transformer Engine, hardware-software logic that dynamically chooses between FP8 and FP16/BF16 precision per layer during training, maximising throughput while preserving accuracy. The Blackwell architecture in the B200 (2024) also added 5th-generation tensor cores with a 2nd-generation Transformer Engine. That is, GPU hardware co-evolved as transformer models scaled. Tensor cores shifted to transformer-optimised primitives, adding native support for attention, lower-precision formats (FP8, FP4), and on-chip precision management to match the compute patterns of modern LLMs.
2.3. GPU Memory Hierarchy
GPU memory forms a deep hierarchy: each SM has its own register file (~256 KB on Volta) and shared memory / L1 SRAM (48-164 KB), all SMs share an L2 cache (40 MB on the A100), and off-chip global memory (HBM/GDDR) holds the most capacity at 200-600 cycle latency. Software has evolved to mask transfers at each boundary. PyTorch’s DataLoader(…, pin_memory=True) paired with tensor.to(device, non_blocking=True) enables direct memory access (DMA) from page-locked host RAM, overlapping host→device transfers with compute, while FlashAttention tiles $Q$/$K$/$V$ into SMEM blocks so $A$ never materialises its $N \times N$ score matrix in HBM.
Both tricks raise arithmetic intensity (i.e. FLOPs/byte moved from memory), pulling kernels off the memory-bound regime. The roofline model in S Williams (2009) formalised it by placing a kernel under either the flat ceiling of peak FLOPS (compute-bound) or the sloped bandwidth ceiling (memory-bound). Modern GPUs widen the gap, with an H100 needing ~300 FLOPs/byte to saturate BF16 tensor cores, far above what most kernels reach. Attention $\mathrm{softmax}(QK^\top)V$, embeddings $E[i]$, and activations $\sigma(x_i)$ are memory-bound, while matmuls $C = AB$ are compute-bound, and thus kernels need coalesced access, shared-memory tiling, and occupancy tuning.

High-bandwidth memory (HBM) achieves its performance through vertical stacking. Multiple DRAM dies interconnected by through-silicon vias (TSVs) and mounted on a silicon interposer next to the GPU die. Each stack exposes a 1,024-bit interface at moderate clock speeds, opposite to GDDR’s narrow buses at high clock speeds. Successive generations from SK Hynix and Samsung (HBM2 → HBM2e → HBM3 → HBM3e) pushed per-stack bandwidth from ~250 GB/s to ~1.2 TB/s, while the H100’s five HBM3 stacks deliver 3.35 TB/s for 80 GB, and the H200 (HBM3e) reaches ~4.8 TB/s. Wider bus and lower power per bit make HBM the AI/HPC standard.

2.4. Interconnection
Peripheral component interconnect express (PCIe) is the standard system interconnect, with each generation (Gen) roughly doubling bandwidth, from Gen 1 (2003, ~4 GB/s ×16), Gen 2 (2007, ~8 GB/s), Gen 3 (2010, ~16 GB/s), Gen 4 (2017, ~32 GB/s), Gen 5 (2019, ~64 GB/s), to Gen 6 (2022, ~128 GB/s via PAM-4 modulation). A PCIe link aggregates full-duplex serial lanes (×1, ×4, ×8, ×16) with differential signalling, replacing the shared parallel PCI and AGP buses of the early 2000s. Yet for multi-GPU HPC and AI workloads this is insufficient, as training large models exchanges gradients, activations, and KV caches at rates that saturate even Gen 5.
NVLink (Pascal) is a GPU-to-GPU interconnect doubling per generation, from 1.0 (160 GB/s, P100), 2.0 (300 GB/s, V100), 3.0 (600 GB/s, A100), 4.0 (900 GB/s, H100), to 5.0 (1.8 TB/s, B200). NVSwitch (Volta) is a switch chip giving all-to-all GPU links at full NVLink bandwidth, past point-to-point topology limits. DGX systems pack these into multi-GPU servers (e.g. DGX H100 with 8× H100), while the GB200 NVL72 wires 72 Blackwell GPUs at 1.8 TB/s into a rack-scale node. The nvidia collective communications library (NCCL) implements topology-aware all-reduce, all-gather, and broadcast primitives, the backbone of distributed training in PyTorch and JAX.
For cluster-level communication, InfiniBand, a switched fabric for HPC and AI clusters, provides remote DMA (RDMA), enabling zero-copy, kernel-bypass transfer at sub-$\mu\mathrm{s}$ latency. Bandwidth has grown from SDR (10 Gbps) to NDR (400 Gbps), with GDR (1.6 Tbps) planned, and NVIDIA acquired Mellanox in 2020 for $6.9 billion. The emerging Compute Express Link (CXL) standard, on the PCIe physical layer, adds cache-coherent protocols (CXL.io, CXL.cache, CXL.mem) letting CPUs and accelerators share coherent memory, unlocking heterogeneous compute and memory pooling.
2.5. Benchmark
GPU compute performance is measured in floating-point operations per second (FLOPS). Peak FLOPS depends on core count, clock speed, and precision format, with lower precision yielding higher throughput since more operations fit per cycle. For instance, A100 delivers 19.5 TFLOPS at FP32 and 312 TFLOPS at FP16 via tensor cores, while achieved FLOPS falls well below peak in practice due to memory bottlenecks, kernel launch overhead, and idle cycles. Subsequently, Model FLOPS utilisation (MFU), which is the ratio of achieved to theoretical peak, is the standard efficiency metric for training runs where 30-60% is typical at scale.
Notice that FLOPS and FLOPs, both looking like a twin, measure different things. FLOPS is a rate, counting floating-point operations completed per second, used in peak-performance claims as in “312 TFLOPS on the A100”. FLoating point OPerations (FLOPs) is a count measuring the total operations in a workload, used in ratios like arithmetic intensity (FLOPs/byte) or training budgets ($\sim 3.14 \times 10^{23}$ FLOPs for GPT-3). The two relate via “wallclock time” $\approx$ “total FLOPs” $/$ “effective FLOPS”, so the same workload runs faster either by reducing its FLOPs (e.g. quantisation, sparsity) or by raising delivered FLOPS (e.g. better kernels, higher MFU).
| Architecture | Year | AWS | Key Innovation |
|---|---|---|---|
| Tesla | 2006 | - | Unified shaders; CUDA; 128 SPs (G80) |
| Fermi | 2010 | - | L1/L2 cache hierarchy; ECC memory; 512 CUDA cores |
| Kepler | 2012 | P2 (K80) | Dynamic Parallelism; Hyper-Q; SMX units |
| Maxwell | 2014 | G3 (M60) | Power efficiency; unified virtual memory |
| Pascal | 2016 | - | HBM2; NVLink 1.0; 16 nm FinFET; 3,840 CUDA cores (GP100) |
| Volta | 2017 | P3 (V100) | Tensor Cores; independent thread scheduling; 5,120 CUDA cores (V100) |
| Turing | 2018 | G4dn (T4) | RT Cores (ray tracing); 2nd-gen Tensor Cores |
| Ampere | 2020 | P4d (A100) | TF32/BF16/INT8/sparsity; 6,912 CUDA cores (A100); MIG |
| Hopper | 2022 | P5 (H100) | Transformer Engine (FP8); 4th-gen Tensor Cores; NVLink 4.0 |
| Blackwell | 2024 | P6 (B200) | 5th-gen Tensor Cores; NVLink 5.0 (1.8 TB/s); two-die design (208B transistors) |
–>
I gathered words solely for my own purposes without any intention to break the rigorosity of the subjects.
Well, I prefer eating corn in spiral .